
Each and every year, FIRST releases a new game that requires each FRC team needs to design, build, and program a new robot to compete in. In addition to the human driver period, called the teleoperated period, each game has what is called an autonomous period. The autonomous period is a portion of a match where the robot is controlled via pre-programmed instructions. During this period, the robot is allowed to use its on board sensors to aid it in completing its tasks. One of the many different sensors that can be used is a simple network camera.
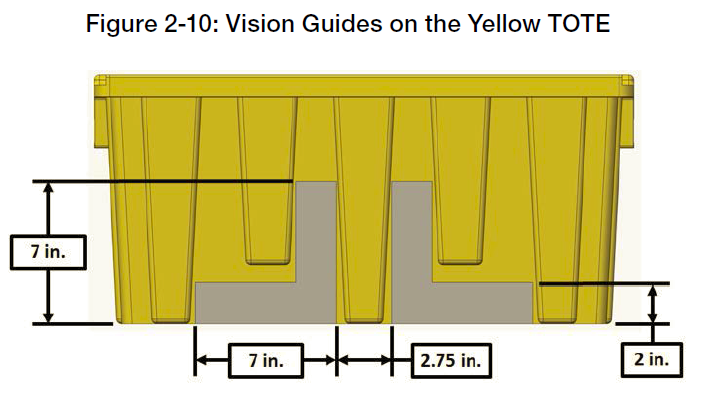
This network camera can be used for tracking different objects on the field, such as the tote pictured above. Each game provides opportunities for vision tracking, which usually involves detecting the location of retro-reflective tape on a game piece or around a goal. In the past, the Warlocks have experimented with vision tracking using an old network camera out of the kit of parts from ~2009. With the older style robot controllers in the past, it was difficult to implement vision tracking on the lower powered CPU.
This season, the warlocks plan on using a new IP camera obtained from CCTV Camera World and the newer robot controller to improve upon our vision tracking efforts of the past. With the new camera and faster on board processor in the RoboRio, we can now perform vision tracking on board rather than processing images on the driver station laptop. With the new camera, we will also be able to capture clearer and more accurate images for use in tracking objects as the robot is moving. We can also utilize its network connectivity for sending images back to the driver station laptop to help the drivers maneuver the robot during the teleoperated period.