
Twenty Years of Warlocks Robots
Each and every year, the Warlocks design and construct a new robot to play a new challenge given to us in early January. Each January, a new “game” is released by FIRST, and each team participating in the First Robotics Competition begin to construct a robot to compete in that new game. Each team is only given a short amount of time to design and build their robot for their first competition.
Over the years, the Warlocks have designed and built many different robots to compete in many different challenges. Although most of our robots end up being disassembled shortly after the season, some of them have stood the test of time and are still in use for demonstration purposes. Here is a collection of our past robots, along with a short game description and a list of achievements for that season.
  |
20252025’s game is Reefscape the 2025 FIRST Robotics Competition game, plunges teams into a vibrant underwater world where alliances of three robots work together to restore a simulated coral reef ecosystem. The match begins with a 15-second autonomous period, during which robots navigate the reef, score coral, and harvest algae without driver control. Once teleoperated play begins, robots collect coral from human players and deliver it to reef zones, while unlocking additional scoring areas by dislodging algae and transporting it to either a barge or a processing station. The warlocks first attended the Finger Lakes regional. We had a tough schedule during qualifying but we were still able to rank 19th and the end of qualifying. We got invited to join the 6th alliance and selected by team 1405. Team 6621 also joined us on our alliance. We unfortunately got double eliminated during playoffs. We earned an award no one in team history has ever gotten. Our very own Mr. Barnes won the Woodie Flowers award. Mr. Barnes is a key part of our mentor team. We also earned an imagery award. This did not stop us and it was made known to our competition the Warlocks were gonna be a threat and our next competition Miami Valley. We took the break between Miami Valley to improve our robot. We worked on our auto and made it more consistent. We then attended the Miami Valley Regional. We made a splash during qualifying and ended up being ranked 3rd after qualifying. We were the alliance captain of the third alliance and with our first pick we invited team 2783 to join our alliance. They graciously accepted. We were able to make it to the finals. We faced a very strong 1st alliance with teams 340, 4028 and 432. We were un beat 2-0 in the finals. We were very proud of our performance. We left with the gracious professionalism and event finalist. Our performance at Miami Valley was enough for us to qualify for the FIRST World Championship! We had to make fast travel plans to get to Houston Texas. We also added something new to our robot. We added an algae mechanism so we can score in the barge. This would help us look more appealing to teams during playoffs. We had three days of qualifying at championships. We had some great moments and ranked 25th after qualifying. We were unfortunately not selected for playoffs. This was an unfortunate end to a great season. We were still very proud of ourselves and even got an imagery award on the Daly field. This was our first award ever at championships. This was a great accomplishment for our team… |
20242024s game is Crescendo. This energetic game is themed around a concert stage, where two alliances of three teams compete to create a show-stopping performance. The match starts with a 15 second autonomous period where robots operate on their own, then are operated by drivers for the remaining 2 minutes and 15 seconds. Throughout the game, robots race around the field to score points by retrieving “notes” from the ground and substations, then scoring them in “amps” and “speakers” to amplify their team’s score. For end game, human players may try to shoot three rings on the “microphones” to gain additional points while the robots aim to balance themselves on the “stage” and “harmonize”. We first traveled to the Finger Lakes Regional. We went 7-6 and were ranked 14th heading into playoffs. We were the captain of alliance and selected team 2228 and team 5740. We were eliminated in the 4th round of the playoffs. We won the imagery award in honor of Jack Kamen. Team president Trent McCarthy won the Deans list finalist award. For our second Regional we traveled to the Miami Valley Regional in Cincinnati Ohio. We went 7-7-1 in qualifications and ranked 18th heading into playoffs. We were selected by team 1038, captain of alliance 6. Team 2220 also joined our alliance. We were eliminated in round 3. Our team won the team spirit award. This was a high note to end the season on. |
|
20232023s game is Charged Up. It revolves around an energetic theme of charging stations and electric energy management. Teams use their robots to manipulate two primary game pieces: cones and cubes. The cones are lightweight and stackable, designed to be picked up and placed on tall, mobile structures called “Charge Stations.” The cubes, which are more substantial and cube-shaped, are used to activate various scoring mechanisms on the field, including a balance scale that requires precise placement for maximum points. Throughout the match, teams strategize to efficiently collect, stack, and score with these elements under time pressure, aiming to charge up their station to capacity by the end of the match. The warlocks first attended the Finger Lakes regional. We went 10-6 in qualifications and were ranked 9th after qualifications. We were the captain of alliance 7 and picked team 340 with our first pick and team 250 with our second pick. We made it all the way to the finals but were unfortunately eliminated. We then attended the Buckeye Regional in Cleveland Ohio. We went 7-6 during qualifications and after qualifications we were ranked 15th. We were the second pick of the 6th alliance and were with teams 1405 and 6964. We were unfortunately eliminated in round 3. This brought a end to a season where we were regional finalists. |
|
|
20222022’s game is Rapid React. Teams work together to deliver cargo into the hub in time for the flight to take off. Throughout the game teams shoot their respective color of cargo into the hub to score as many points as possible. At the end of the game teams rush to their hangar to hang on the highest bar they can to score extra. The Warlocks attended the Finger Lakes Regional Competition. At the end of the qualifying matches we were ranked 18th out of 37 teams. Throughout the qualifying issues we faced issues with our robot effectively dying on the field, later being diagnosed as radio issues. This greatly inhibited our ability to preform in qualifying matches and playoff matches. During playoffs we were invited to join the 5th seed alliance by team 2638 and graciously accepted. We made it all the way up to the semifinals, where our radio issues sadly reared their head again and our run in the playoffs were finished. We next headed to Cleveland for the Buckeye Regional Competition. At the end of the qualifying matches we ranked 12th out of 59 teams. Qualifying matches went much smoother, and going into the playoffs we were invited to the 3rd seed alliance by team 3003, we graciously accepted. However in our first playoff match we experienced our radio issues again, and our playoffs ended at the quarterfinals at this competition. Our robot was titled Dos, due to the dual intake we designed it with. We sacrificed a more advanced climbing system in order to achieve this, allowing our robot to only climb up to the mid bar. Our shooting much made up for this however, with our robot having fast rotations and being able to shoot anywhere on the field with out shooter interpolation programming. With our fast climbing system, we were able to score while other teams were spending time climbing to the highest rung, often being able to pull off a mid bar climb with 5 seconds left in the match. Our robot also featured a 4 ball upper hub autonomous program. |
2020 / 20212020s game is Infinite Recharge. It involves two alliances of three teams each, with each team controlling a robot and performing specific tasks on a field to score points. Points were scored by having each alliance shoot small yellow foam balls, or “power cells”, into one of three goals, each varying in height and difficulty. Once an alliance has shot enough power cells they can attempt to spin a color wheel until it lands on a specific color. During the end game points were scored by having each robot hanging from an unstable bar, extra points were given if the alliance could balance the bar. We attended our first regional at the Miami Valley Regional. We went 7-5 in qualifications and headed into playoffs ranked 12th. We were selected by team 554, captain of the 4th alliance. Team 4027 also joined our alliance. We were eliminated in the quarterfinals. We won the creativity award sponsored by Xerox. The rest of the 2020 and 2021 season was canceled due to Covid-19 and the pandemic. We did not participate in the FIRST at home challenge. We participated at Ruckus in October of 2021 and played 2020s game Infinite Recharge. |
|
 |
20192019’s game is Destination: Deep Space. Teams work together to load rocket ships and a cargo ship to prepare for takeoff. Beginning with the Sandstorm period, teams’ vision is compromised by having a screen go down over the window of the Driver Station for the first 15 seconds of the match. During this time, drivers operate their robots through either autonomous code or through the use of cameras on their robot. Once the screens go up, teams may begin operating their robots as normal. Each team works to places hatches over the openings on the rocket ships and cargo ship so that cargo is contained within those rocket ships and cargo ships. At the end of the match, teams race to climb in the HAB zone on Level 1, 2, or 3. Once the match is over, the alliance with the highest score wins. At the Finger Lakes Regional, the Warlocks had some tough matches but ended up being 12th out of 48 teams. We then were selected by 3157 (Alliance Captain of the #4 Alliance) and we graciously accepted. After going to a tiebreaker in the quarterfinal matches, we moved on to the semifinals against the #1 ranked alliance. After 2 hard matches, our alliance was sadly defeated. On March 28th-30th, the Warlocks head to Cleveland, Ohio to compete in the Buckeye Regional. Here we hope to secure our spot to the World Championships in Detroit, Michigan in April! Want to follow the competition? Click here to see all the events. Look for “Buckeye Regional” in the “Week 5” section and you can watch the live stream and follow the Warlocks through the competition. |
 |
20182018’s game was FIRST Power Up. Each alliance works to take control of the switches and the scale for the longest amount of time so they can prepare to defeat the boss. During the match, teams place power cubes on the switches and scale to tip them in their favor. For every second that the scale and/or switch is in your favor, you gain a point. At the end of the match robots race to climb a bar attached to the scale to defeat the boss. At the Finger Lakes Regional, we ranked 5th out of 50 teams with a record of 13-4-0. We were selected to join the #1 ranked alliance. With the #1 ranked alliance, we competed in the finals and won the competition! This win qualified our alliance for the World Championships in Detroit. We were also awarded the Creativity Award sponsored by Xerox. At the Buckeye Regional, we ranked 8th out of 55 teams with a record of 7-5-0. We were the Alliance Captain of the 7th seeded alliance. We were eliminated after our 2 quarterfinal matches. After our win at the Finger Lakes Regional, we headed on to the World Championships in Detroit at Cobo Center. We were ranked 17th out of 68 teams. With a record of 7-3-0, we were selected as the back-up robot for the #6 ranked alliance. Our alliance was eliminated after the quarterfinals matches. |
  |
20172017’s game was FIRST Steamworks. Each alliance competes to prepare each of their airships for takeoff at the end of the match. During the match, robots race to shoot “fuel” into the boiler to generate steam into the airship. On the airship, pilots from 2 teams on a single alliance work together to remove the gears from the robots and place them in scoring position on the rotors. At the end of the match, pilots race to ensure that the ropes are deployed from the airship so that the robots are able to climb up and prepare the airship for take off. At the Buckeye Regional, we ranked 3rd out of 60 teams with a record of 9-4-0. We were the Alliance Captain of the #3 seed alliance. We were eliminated after our second match in semifinals. At the Finger Lakes Regional, we ranked 1st out of 49 teams with a record of 12-4-0. We were the Alliance Captain of the #1 seed alliance. We were eliminated after our second match of finals, however we were awarded the wildcard which allowed us to move on to the Championship competition if we chose to do so. |
 |
20162016’s game was FIRST Stronghold. Each alliance starts the match in the middle of the field, facing the outer works. Scoring is done by shooting boulders into the high and low goals on the castle. Scoring can also be done by crossing the outer works multiple times. Bonus points can be earned by shooting enough boulders to capture the castle and scaling the castle. Our Base was a custom made u-shaped cutout powder coated blue and gold with drop center wheels and had three appendages attached with a two wheel shooter a ball collector to bring balls into the shooter and another set of arms used to lift and bring down different obstacles. At the Greater Pittsburgh Regional, we ranked 32nd with a record of 7-7-0. We were picked by Alliance Captain #5, team 2053. We were eliminated after the 2nd match of the Semifinals. At the Finger Lakes Regional, we ranked 8th with a record of 7-5-0. We were Alliance Captain of the #6 seed team. We were eliminated in our 2nd match of the Quarter finals. |
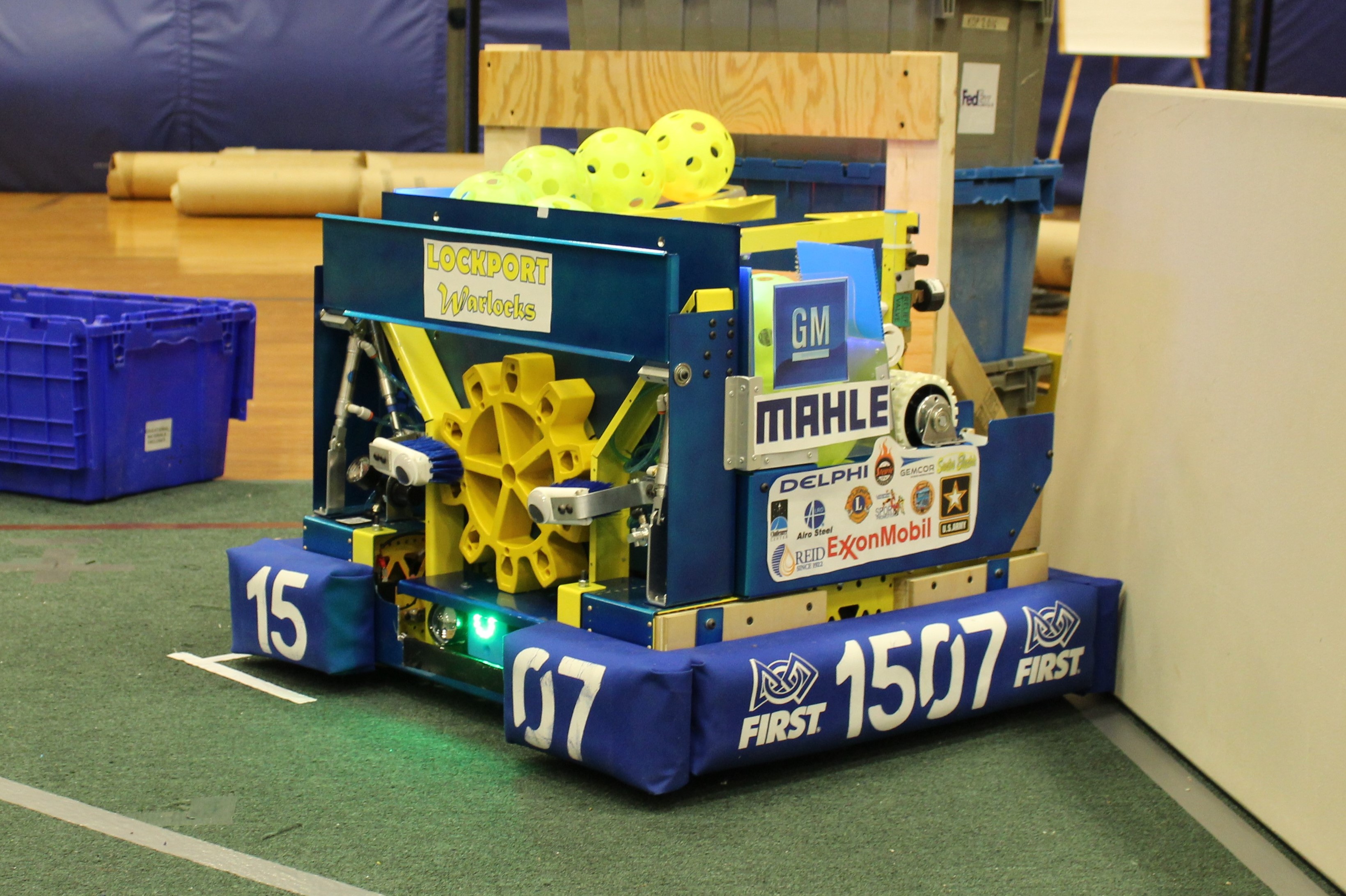
 The pit crew pose with the 2015 robot
|
2015This years game called “Recycle Rush” brings back the stacking theme first introduced in 2003. Each alliance plays on their side of the field, which is separated by a barrier called the step. Each team scores points by creating stacks of storage totes on top of the scoring platforms. A recycling container can be placed on top of a scored stack to earn bonus points. Similar to last year, this year’s robot was built on top of our “Uni-body” chassis, which was designed by our CAD students and machined at our local sponsor. Our stacking mechanism consisted of a set of cleats attached to a vertical lift belt. We also have a set of intake rollers, which guides each tote up to the elevator cleats. In addition, we designed 2 side arms in order to grab and manipulate the recycling containers. At the Greater Pittsburgh Regional, we ranked in the 8th position after earning an average score of 61 during the qualification rounds. We were drafted by the #3 seed, and formed an alliance with 3015 and 3260. Our alliance placed 1st after the quarter finals, but were eliminated after a tough semi-final match brought our average score just below what we needed to advance to the finals. At the Finger Lakes Regional, we were able to perfect our 3 tote autonomous and placed 3rd in the qualification rankings. We were then drafted by the #2 seed, and formed our playoff alliance with 1126 and 3838. Our alliance played strong, but a fallen stack in the semi-finals cost us our chance to play in the finals. Although we didn’t make it into the finals, we were able to win the Innovation and Control Award for our 3 tote autonomous. |
 |
2014The Aerial Assist game brings back a large workout ball to throw through various openings for varying points. A truss across the center line of the field is used to score additional points for tossing the ball over it. The game focuses on cooperation between alliance robots and increases the points scored for assists where robots interact to bring the ball down the field. We designed a strong and compact robot this year using a base fabricated out of a sheet metal design our CAD students drew and cut, punched, and folded by our sponsors. Another sponsor powder-coated many of the chassis components, making this one of our best-looking robots. Our shooting-catching mechanism uses elastic tubing drawn back by a motorized winch to shoot the ball. A two-stage pneumatic cylinder allowed us to quickly and precisely go to four different shooting positions and a hinged wrist joint allowed the roller arm to pick up balls from the floor with ease. At the Buckeye Regional, we were ranked #2 with a 9-2-0 record. As #2 Alliance Captains, we chose 1731 and 3484 to join us. We were eliminated in the semi-finals after winning our way through the quarters. We also won the GM Industrial Design Award and one of our students, Mike Primerano, was chosen for the Dean’s List Finalist #1. In the Finger Lakes Regional, we fought to be ranked #1, ending up with a 12-1 record. We chose founding team #20, The Rocketeers, to be our second pick and were surprised to find team 378, The Circuit Stompers still available for the last pick of the day. It turned out to be a winning alliance and we won the regional against some very good teams. The win at RIT gave us a spot to compete at the Championship Event in St. Louis, where we ranked 66th with a record of 4-6. We were selected as the backup robot for the #3 seeded alliance of 910, 846, and 330. Our 4 team alliance was eliminated in the quarter finals, ending our run for the championship. |
 |
2013Ultimate Ascent was a game of Frisbee, with robots throwing discs through openings at the end of the field for points. Two pyramids in the center of the field that looked a bit like jungle-gyms, were both goals and the end-of-game bonus. A small area at the top could receive discs for point, especially special colored ones during the endgame, but the main purpose of the pyramids were to climb. Three levels of rung were worth higher levels of points if a robot could hang from them at the end of the match. Some specific rules made this harder then it sounds, for instance robots were not allowed to touch or be supported by more than one level. You couldn’t just reach from the ground up to the third level. The Warlocks built a robot that could hang at the lowest level very quickly, eschewing the higher levels to concentrate on shooting and scoring points throughout the game. We could shoot the discs we started out with during autonomous very effectively and were able to turn and pick up additional discs immediately. Our teleop shooting was also very good and we were able to score points in the highest goal from many areas of the field. We attended Finger Lakes (Xerox Creativity Award) and Buckeye Regionals again, bringing home the silver medal from Cleveland after we broke down in the final round after going undefeated. Ironically, we also won the Quality Award. |
 |
2012Rebound Rumble brought the game of basketball to the robotic arena, using 8-inch foam basketballs and four basketball hoops, complete with nets at the ends of the field. The higher the hoop, the more the points. In the center of the field were three platforms that could tilt like a teeter-totter. Any balls not held by the robots at the beginning of the game were placed on these balancing bridges, which spanned over a obstacle bump across the center of the field. During autonomous, the robots could shoot three balls and pick up others. Our robot was capable of shooting our basketballs, taking balls from another robot and shooting them, or turning around and getting the balls off one of the ramps. The main part of the game, of course, was a free-for-all chasing balls, picking them up and shooting them. Human players could throw the balls for points as well, but mostly served to pass them to the robots. At the end of the game, points were awarded if robots could get onto and balance the bridges. You could only use the bridge of your own alliance color and if you could squeeze all three robots on, it was a big bonus. The center, “Coopertition Bridge,” was neutral territory and if a robot from each alliance could balance on it, they received a coopertition point for both alliances. It didn’t gain points for the match, but affected the ranking system for the final rounds. It was a controversial aspect of the game. The Warlocks built a very effective shooting robot, called Zeus, and had some effective autonomous strategies that usually put us ahead at the beginning of the match. We won both the Finger Lakes and Buckeye Regionals, and attended Championships in St. Louis, where we went into the quarterfinals in the Curie division. The Buckeye Regional also awarded us the Xerox Creativity Award and Website Award. |
  |
2011Logomotion brought back the inflatable pieces, this time in four shapes, white circles, red squares, and blue triangles, with yellow bonus rings. The pieces were to commemorate the design of the FIRST Logo by Dean’s brother, Bart Kamen. The yellow rings were placed during autonomous play and doubled the score of the rings that were placed over them later. The goal was to hang rings on pegs at the end of the field in order, to create the FIRST logo. The higher pegs were worth more, so high-reaching robots were the norm. The end-of-game bonus was unique this year. Each robot could carry a minibot, whose job was to climb a pole to the top, tripping a light. The first one up one of the four poles got the biggest bonus and each one thereafter during the 15 second bonus period, got slightly less. Being able to be deployed and climb to the top of a ten-foot pole quickly was quite a design challenge for the little bots. The team attended the Buckeye Regional bringing home the Silver medal as well as the Website Excellence Award, Coopeertition Award and the award for the best minibot! We also attended the Championships in St. Louis. |
 |
2010In 2010, Breakaway took it’s inspiration from soccer. Game pieces were regulation soccer balls and kicking or rolling them into openings in the end of the field. Getting across the field was complicated by a hump across the middle. If your robot couldn’t get over that, it had better be short enough to go through a tunnel in the middle! Balls returned to the field were rolled down a superstructure to land in the opposite end of the field. At the end of the game, for bonus points, robots could hang themselves off the superstructure. Lessons learned from the game in 2004 helped us there. The Warlocks entered the game with a robot featuring mechanum wheels and holonomic drive, able to kick the ball across the hump and score with reasonable accuracy. A pitchback net was used to deflect the balls back to our end of the field when they fell off the superstructure. The final touch was our hanging mechanism, which extended up to place hooks on the bar and a winch that hauled it up once attached. It was quite effective. The Warlocks attended the Finger Lakes Regional earning an Engineering Excellence Award and Excellence in Design Award. We were not entered in any other regional and had hoped to go to the Championships, but were not chosen to go. |
  |
2009It was Lunacy to try to drive a robot on a slick surface, but that was the game this year. In order to emulate the one-sixth gravity of the moon, in commemoration of the anniversary of the Lunar Landing, the field had a plastic “regolith” surface and the robots used slick plastic wheels. The game used balls made of woven straps and the goals they had to be placed into were towed around behind the robots. Human players could throw the balls into them, or a robot could shoot them into their opponents trailer. Much of the game was avoiding getting pinned and dumped on, but effective handling of the balls and shooting them made a good offense. Certain colored balls were extra bonus points and came into play at the end of the game, introduced by human players through a “fueling station” at the side of the field. Vision targets on the trailers enabled autonomous scoring at the beginning of the match. Our team traveled to both the Finger Lakes and Buckeye Regionals, winning at RIT and going to Atlanta to compete in the Championships. There, we won the Newton division and made it to the first rounds on Einstein Field, for our best performance ever. At Finger Lakes, we won the General Motors Industrial Design Award. |
  |
2008Taking a racing motif, FIRST Overdrive had us going around in circles chasing a big ball and tossing it over a rack in the middle of the track. At the beginning of the game, the red and blue balls were placed on the rack and could be knocked off during autonomous for bonus points. Points were also given for completing turns around the “track.” The robot could also be helped by a human player with an infrared (IR) remote to issue commands. Each lap scored points as you carried, pushed or threw the balls along. Extra points were earned by throwing the ball over the rack. With three robots on an alliance, but only two balls of each color, it took some teamwork and cooperation. The Warlocks attended both the Finger Lakes and Greater Toronto Regionals, bringing home silver medals from Canada. |
 |
2007Rack And Roll was the game for this season. The game was based on hanging inflated rings on a central rack in the middle of the field. Points were accumulated by the alliance color being the last one on the peg. Black bonus rings added to the score and completing rows and columns around the rack multiplied the scoring. Naturally, it was a fast and furious race to hang the most rings. An autonomous period began the matches with robots attempting to successfully hang rings unaided by human control. At the end of the match, if a robot could support their other alliance robot off the ground and keep it there at the buzzer, bonus points were awarded. Supporting two robots was even better and earned a higher award. The Warlocks attended the Finger Lakes and Buckeye Regionals that year. |
  |
2006Our sophomore season was less spectacular. Aim High was the name of the game and used Nerf balls about 8″ in diameter as playing pieces. A high circular goal at each end of the field was the target as robots shot the balls into it. During autonomous, robots attempted to shoot balls through the goal assisted by a lighted target over it. A platform under the goal made it difficult to get close to the goal, but awarded a bonus if the robot was on it at the end of the match. We attended Fingerlakes and Chesapeake Regionals. |
  |
2005In our inaugural year, the Warlocks built a simple, but effective robot to play the game, Triple Play. During the game PVC pipe pyramids, or tetras, were placed on top of larger pyramid goals for points. Bonuses were awarded for the alliance color being on top of three goals in a row, across, down, or diagonally, like a large tic-tac-toe game. The race to cap each goal with your alliances’ color tetra led to some high stacking on the goals. Bonus points were made during autonomous by dislodging tetras hanging inside goals, or locating special tetras with vision targets. The Warlocks attended two regionals. Since we had received a NASA grant as a rookie team, we attended the Chesapeake Regional in Annapolis MD which was a NASA sponsored event. We were awarded Highest Rookie Seed honors at this event. We also went to the very first Fingerlakes Regional at RIT and very nearly won it. Only a last-second bump into the center pyramid that dislodged some tetras cost us the win. We then went to the Championships in Atlanta, where we received honors as Highest Rookie Seed on the Galileo field. |
